前回からずいぶんと時間が経ってしまいごめんなさい。
さて、今回は前回の
JADO T860ドライブレコーダー駐車監視サブバッテリー化と車載Amazon Echo用タイマー【試作編】
の続編。
テスト走行をおこない、いろいろ予期しない不具合もあったけど、どうにか運用できそうだということになった。
今回は、回路や制御モジュールの動作について説明したいと思う。
同じようなことを考えている人には多少参考になるかもしれない。
只、ちょっと小難しいかもしれないので、あまりご覧にならない方が良いと思う。
サブバッテリーを積む理由
なぜサブバッテリーを積もうとしたかの理由について改めて書いておこうと思う。
理由は以下の2つ。
①24時間監視ドライブレコーダー用電源の確保
②車載Alexa(Amazon Echo)と車載Wi-Fiルーターのエンジン停止後のしばらく動作継続
それぞれ詳しく言うと、
①24時間監視機能付きのドライブレコーダー JADO T860はエンジン停止時からタイムラプス録画を始める。
この動作に車載バッテリーからの電力を使う。
このため車載バッテリーの電力消耗が気になる。できれば別電源からの供給にしたい。
②遠距離のドライブで、車載Alexa(Amazon echo dot)で音楽を聞いている。
途中で休憩などのためエンジンを切ると、車載Alexaと車内Wi-Fiルーターも電源が切れてしまう。
次に走り始めたときに電源がオンするが、それぞれ動作開始するまでに時間がかかり、すぐに音楽再生ができない。できれば、すぐに楽曲の続きを聞きたい。
そこで、エンジンオフでも、休憩の時間ぐらいは車載Alexaと車内Wi-Fiルーターを電源オンのまま生かしておきたい。
と、いうわけだ。
(下はAmazon echo dotとWi-Fiルーター)


テスト走行をおこない、ハイブリッド車でも特に問題が無いことを確認できた。つまりちゃんと充放電制御ができた。
ハイブリッド車は、ガソリン車と違って車載バッテリー(ハイブリッド車では補機バッテリーと呼ばれる)の充電方法が違うように思うかもしれない。
しかし、そんなことはなく、充放電のサイクルは同じである。
(下はハイブリッド車(ホンダ 旧ヴェゼル)に搭載されている補機バッテリー)

違いはオルタネーター(発電機)からの充電からではなく、走行モーター用バッテリー(ニッケル水素やリチウムイオンバッテリー)から分けてもらうということ。
そのため、ちょっとした盲点がある。
ガソリン車では、バッテリーの容量が低下すると、セルモーター(スターター)の回転が鈍くなったりして、「あれ、おかしいな?」とユーザは気づきやすい。
しかし、ハイブリッド車の場合、セルモーターが無いため、容量低下に気付けないケースが出てくるだろう。
もし補機バッテリーが上がると、ハイブリッドシステムそのものが起動できなくなるため、出掛けようとしたら、「あれ?動かないゾ!」というケースに遭遇することになる。
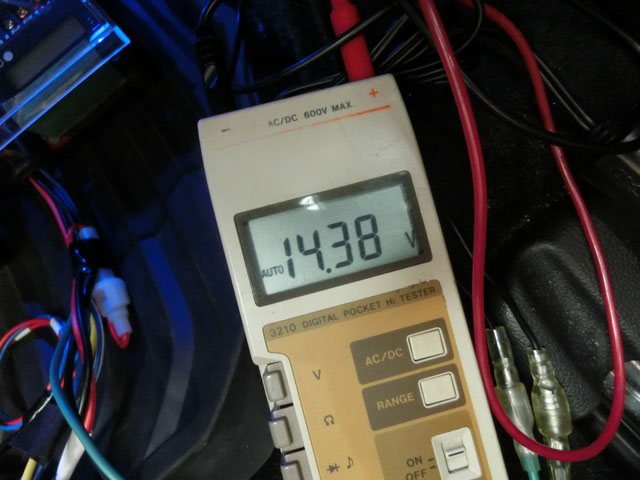
(ハイブリッド車の動作中の電圧はガソリン車と変わらない)
サブバッテリーシステムの機能と動作説明
わかりやすくするため、元々車載されているバッテリーを「メインバッテリー」、新たに増設したバッテリーを「サブバッテリー」と呼ぶことにする。
サブバッテリーシステムの機能は以下を実現する必要がある。
■充電制御
エンジン(もしくはハイブリッドシステム)が動作中は、サブバッテリーが減っていれば充電、でなければ切り離し。
■ドライブレコーダーへの電源供給
ドライブレコーダー T860へはずっと電源供給するが、エンジン停止後の監視時間が最長24時間なので、その間の電源確保。
ちなみにT860の消費電流値は、
通常動作時(録画中):530~630mA(電圧が低いほど電流値が多くなる)
タイムラプス動作時(ACCラインが0Vになるとタイムラプスへ移行):290~320mA
ACCラインは電圧を監視しているだけで、流れる電流は250~260μA(マイクロアンペア)でしかない。
■タイマー回路での電源供給
車載AlexaとWi-Fiルーター用に指定した時間だけ電源を供給する。
■安全機能
少なくともフューズは入れる。温度異常による停止回路は無い。
また異常動作に備えて手動の緊急停止スイッチ、バイパススイッチを入れる。
動作の概要
■通常走行時(ガソリン車の場合はエンジンがかかっている状態、ハイブリッド車の場合はシステムがREADYの状態)
メインバッテリーから電力がサブバッテリーへ充電されつつドライブレコーダーへ電力が供給される。
サブバッテリーへ充電するかどうかは、充放電モジュールが電圧から判断して切り替える。
車載Alexa(+車載Wi-Fiルーター)の電源は、メインバッテリーへ接続される。
■エンジン停止(ハイブリッドシステム停止時)
メインバッテリーからの電圧断を検知して、ドライブレコーダーは自身の回路でサブバッテリーの電力でタイムラプス動作へ移行する。
タイマーが動作を開始し、指定した時間だけ、車載Alexaと車載Wi-Fiルーターへ電力を供給する。
タイムアップでタイマー回路自体も電源を遮断するようにする。これは、回路の暗電流でサブバッテリーの消耗を押さえるためだ。
理屈としては簡単である。理屈は簡単だが、実際の動作はそう簡単にはいかない。回路は二転三転した。
各モジュールの動作
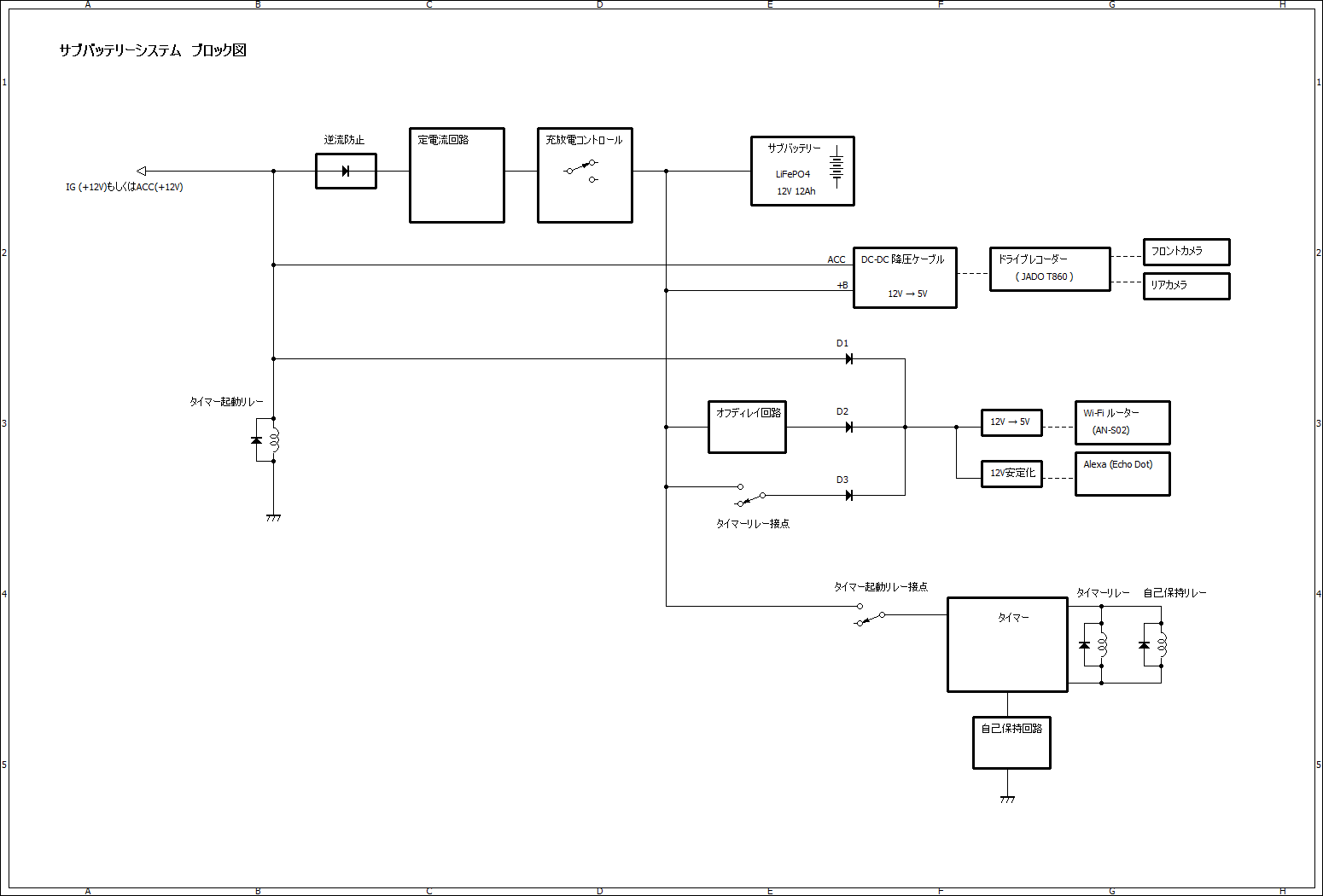
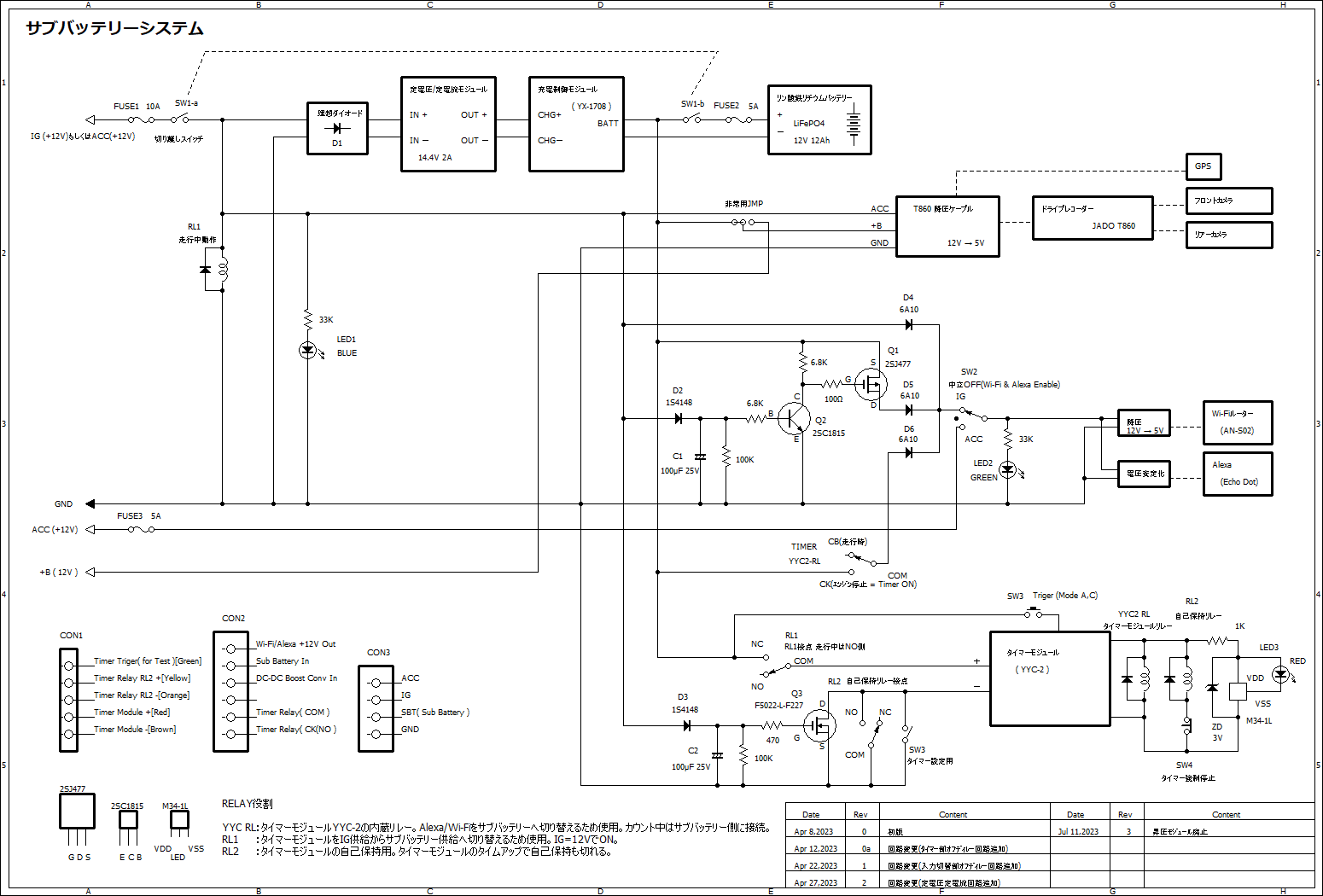
ブロック図と回路図で動作の説明をしよう。
(ブロック図)
(全体回路図)
まず、メインバッテリーからの電流は、逆流防止のためのダイオードを通り定電流モジュールに入る。
使っているダイオードが「理想ダイオード」と呼ばれるもので、電圧降下が極めて小さい。
これは、回路によってダイオード同等の動作をするもので、電圧降下の値は0.03~0.04V。
この特性のため「理想ダイオード」と呼ばれる。
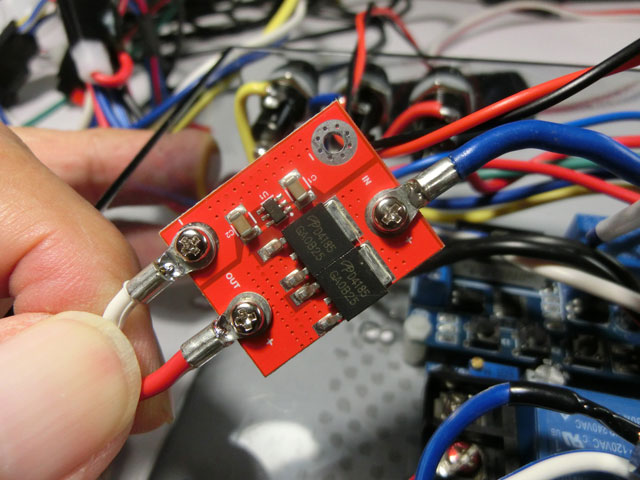
ちなみに普通のPN接合のシリコンダイオードでは0.6~0.7V、ショットキーダイオードでも0.2~0.3V程度の電圧降下が発生する。
充電電圧を確保するためにはこういったデバイスを使うのも手であると思う。但しお値段が少々高いのが痛い。
次に定電流モジュールで電流制限をしたあと、充電コントロールモジュールに入る。
定電流モジュールがないと、一気に大電流(5A以上)が流れ込もうとする。
これでは、回路的に少々危険なため、定電流モジュールで最大2Aの電流制限をしている。
そして、充電コントロールモジュールはサブバッテリーの電圧を監視して、充電するか否かを判断する。
といっても動作は簡単で、電圧によってリレーを動作させ、メインバッテリーへつないだり、切り離したりしているだけである。
前回の記事では、メインバッテリーからの電力を一旦、昇圧モジュールで電圧を上げていたが、そこまでしなくてもちゃんと充電できるようなのでこのモジュールは外した。
一応、今回使用したリン酸鉄リチウムバッテリーの推奨充電電圧は14.4V±0.2Vだ。
まあ、バッテリー寿命にどう関わってくるかはわからないが、推奨充電電圧でなくてもバッテリー電圧より高ければ充電はされるようである。
充放電回路が構成できれば、あとは負荷側であるドライブレコーダーと車載Alexa側の話しとなる。
ドライブレコーダーについては、先に書いたように勝手に回路が切り替わるから特に何も考えなくて良いが、問題はタイマーによって動かす車載Alexaと車載Wi-Fiルーターだ。
メインバッテリーからの電力供給が途絶える、つまりIG(イグニッション電源)やACC(アクセサリ電源)が0Vになると、サブバッテリーからの供給に切り替え、タイマーを起動させる。
当初は、単純にタイマーリレーの接点にそのままつなげたのだが、これがどうもうまくいかない。
タイマーモジュールは起動するまでに僅かな時間を要すると共に物理的なリレー接点を動かすため、ほんの僅かだが、回路の切れる時間(瞬停)が生じるのだ。
すると、そんな短い時間でもAlexaの電源が落ちてしまう。
再びAlexaが使えるようになるまではしばらく待たなければならない。
それは良しとしても、残念なのが、聞いていたプレイリストが一曲目に戻ってしまうのである。
その僅かな時間だけ持ちこたえられるように、大容量のコンデンサを入れてみたり、スーパーキャパシタを入れてみたりしたのだがイマイチ動作が不安定だった。
そもそも、大容量コンデンサやスーパキャパシタは図体がでかいので、ケースに収まりが悪いというのもある。
この対応策として、入力(IG/ACC)が0Vになったら、しばらくサブバッテリーの電流を先に流し、その間にリレー接点を切り替えてやろうという苦肉の回路を考えた。
それが図中の「オフディレイ回路」だ。
(オフディレイ回路)
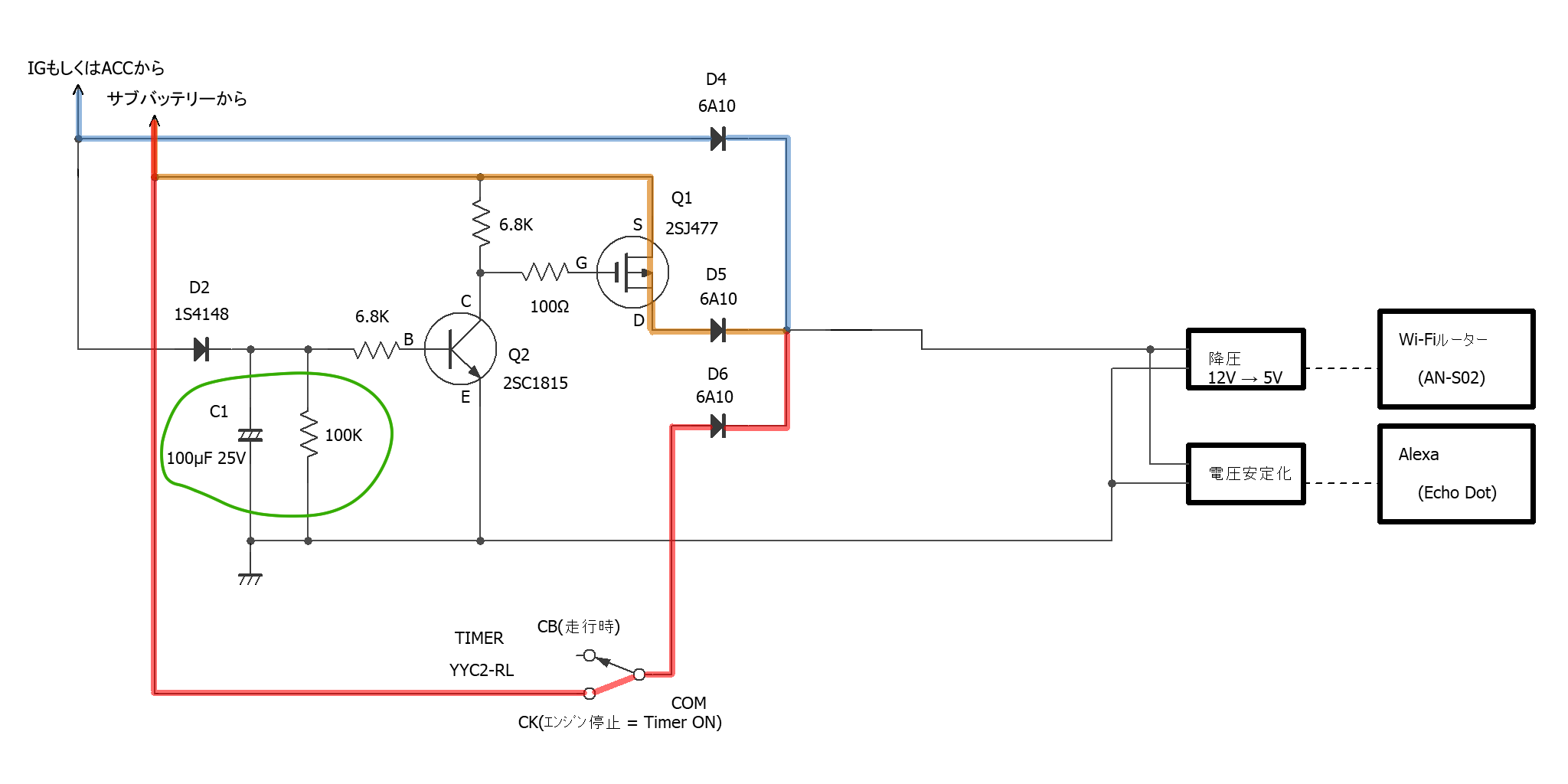
詳しく説明すると、
走行中は、IG(イグニッション電源)又はACC(アクセサリ電源)の青のラインで電源が供給されている。
エンジン停止で、タイマーリレーが働き、赤のサブバッテリーのラインへ切り替わるのであるが、そのままでは上記のような瞬停時間が発生する。
そこで、タイマーリレーが動作するまで、バイパス回路で電力を補償してやるようにする。
それが、オレンジ色で示した、供給ラインである。
入力が0Vになっても緑の線で囲まれたコンデンサ、抵抗によって、一定時間トランジスタQ2はオンしている。
Q2がオン中はPchMOSFETのG(ゲート)はグランドレベルに落とされ、MOSFETはONの状態で電流が供給される。
この時間中に、タイマーリレーが動作して、赤い線の供給ルートが確立する。
やがてコンデンサが放電すると、ベース入力が0VとなりQ2がオフ、MOSFETのゲート入力もハイレベルになるためオフする。
MOSFETのルートから、リレー接点の回路へバトンタッチするわけだ。
PchのMOSFETをハイサイドスイッチ(負荷の+側に入れる方式)として使用しているが、この回路は入力が0Vになるとしばらく何かを動かすという用途に応用できるだろう。
これで、車載Alexaが一旦切れてしまうという不具合は解消された。(車載Wi-Fiルーターは元々内部にスーパーキャパシタを持っているので瞬停には耐性がある。)
次はタイマーモジュール。
まずタイマーモジュールの設定。この中華製タイマーモジュールは優秀で、いろんなパターンの動作が指定できる。
今回の設定は、電源が供給された時点でカウントダウンを始めるというモード。
つまり起動トリガーが電源入力ということになる。
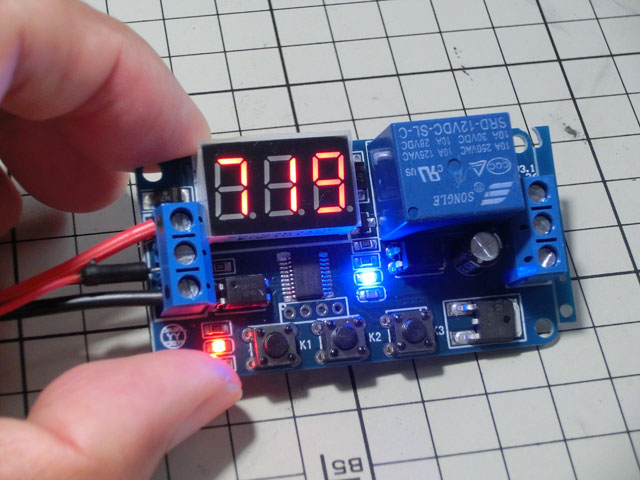
そして、もう一つほしいのが、タイムアップした段階で、タイマー自身の電源も切り離す機能。
なぜなら、このタイマーモジュール、3桁の7セグのLEDを搭載してたりするので、動作し終わった後でも消費電力がけっこう大きい。
これでは、サブバッテリーが早く消耗してしまう。
そこで、自己保持回路を作って、タイマーが切れると同時に自身の電源も断つようにした。
回路は以下のようになっている。
(自己保持とディレイ回路)
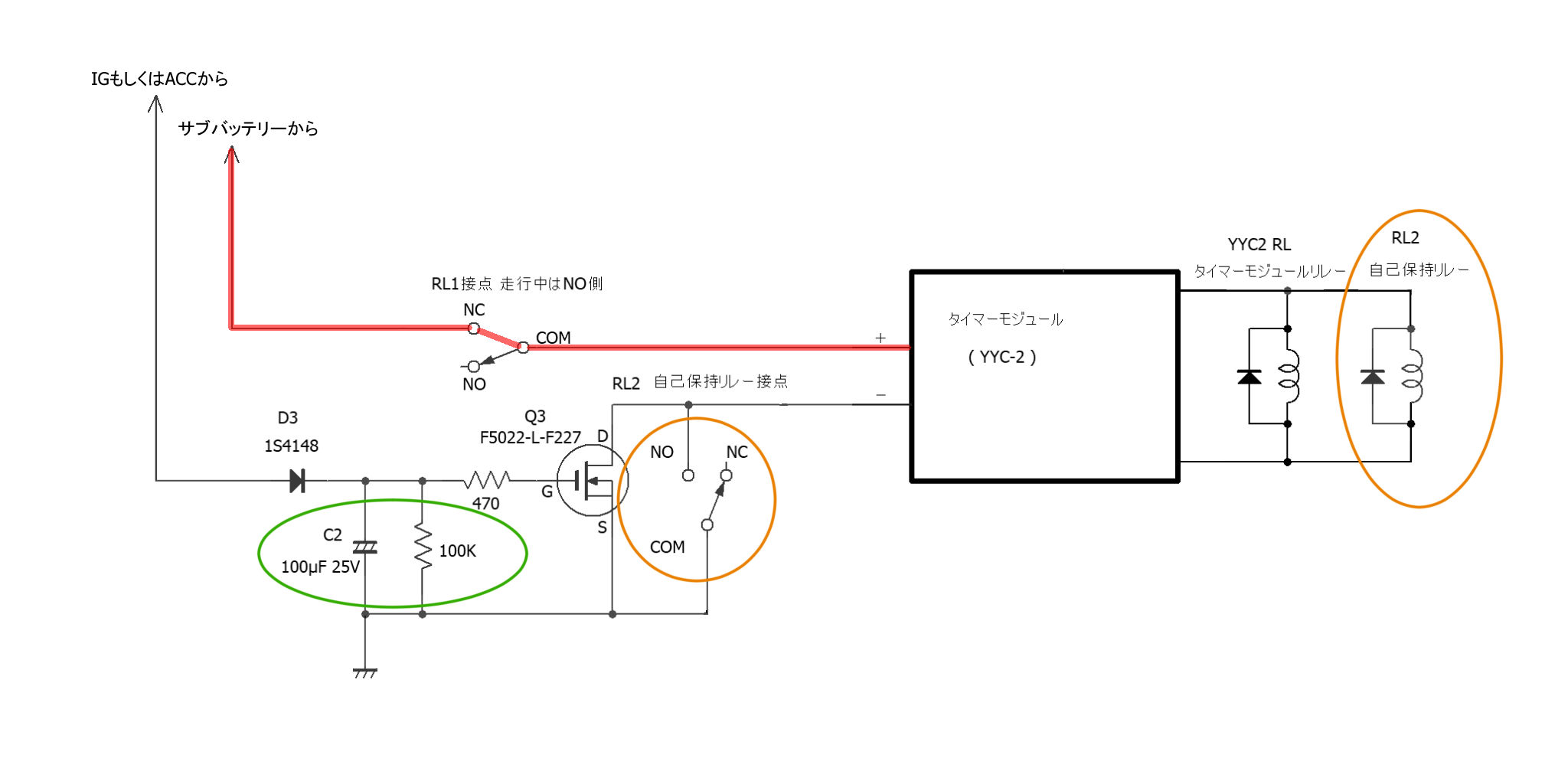
まずタイマーモジュールのリレーと並行に自己保持用リレーを追加してやる。
このリレーによって、タイマーモジュールのマイナス側を切り離すのだ。そうすれば電流は流れなくなる。
自己保持回路にはオフディレイ回路も入っている。
動作は以下のようになる。
IG(イグニッション電源)又はACC(アクセサリ電源)が切れると、RL1リレーが切れて、タイマモジュールにサブバッテリーからの電源が供給される。
(R1リレーは、IGもしくはACCがオンの時に動作しているリレー。全体回路図参照。)
ディレイ回路は、入力がなくなると、コンデンサと抵抗(図中緑の〇部分)によって、一定時間NchMOSFET Q3がオンする。
ということは、タイマーモジュールのマイナス側がグランドと接続され、タイマーモジュールが動作を始める。
タイマーモジュールが動作しはじめると、タイマーリレーと自己保持リレーも動作する。(図中オレンジの〇部分)
これで、リレー接点による自己保持の回路が形成される。
やがてコンデンサの放電でMOSFETはオフとなり、MOSFETによるグランド接続は断たれる。つまりディレイ回路は役目を終える。
タイマーモジュールがタイムアップすると、タイマーリレー、自己保持リレーが切れて、マイナス側が断たれるため、自身の電源が断たれるという仕組みだ。
こちらはNchMOSFETを使ったローサイドスイッチ、つまりマイナス側ををスイッチする回路になっている。
これも何かに応用できるかもしれない。
回路をあれこれ考え追加していったが、「理屈は簡単でも、実際の動作は、そう簡単にはいかない。」と言ったのはそういった理由である。
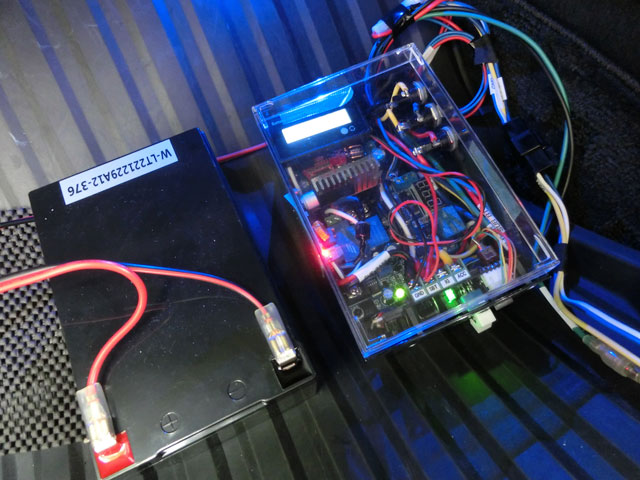
実装
今のところ、試作段階であるため、回路は蛇の目基板に組んで、100均で売っていたプラケースに入れてある。これは前回の状態と同じである。
注意点は、引き回しに支障にならない範囲でなるべく太い線材を使うことだろう。
最低でも0.75sqぐらの線は使うべきだ。
今回の試作実験のため、中華製の安くて細い線のミノムシクリップを使用していたら、過熱して危ない思いをしてしまった。
当然、測定電圧もおかしくなる。やっぱり、中華クオリティというのはいまだにあるね。
また、バッテリーと回路をつなぐコネクタもそれなりのものを使用したい。
小型UPSでよく使われている、小型のアンダーソンコネクタを使用した。
Amazonで購入した中華製だから、たぶんニセモノの互換品だろうが、これは特に支障なく使えている。
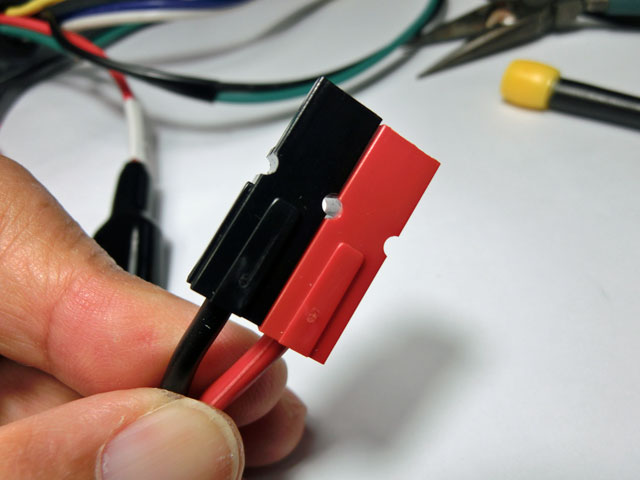
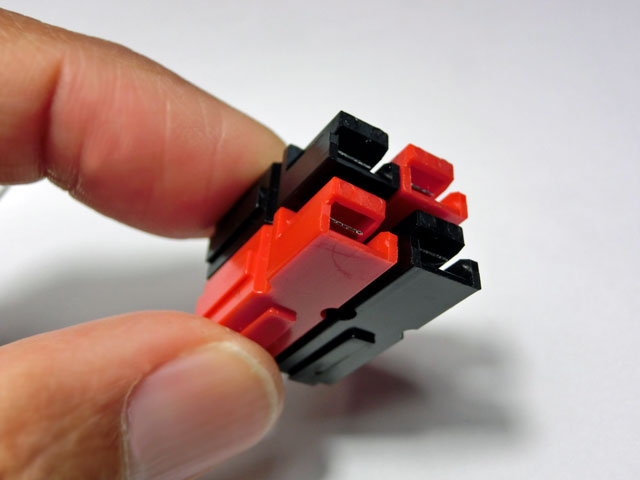
このコネクタの良いところは、溝があってパズルブロックのようにお互い連結できるところだ。
こんな具合に4重にしたりもできる。
実際の回路にはバイパスプラグや、切り離しスイッチも設けてあるが、これらもちゃんと許容量や規格を満たしたものを使うべきだ。
なんたって、無人時に動作する代物。異常が起きては大変である。
将来的には、ちゃんと金属ケースに収め、ノイズ対策もちゃんとやりたい。
一応、昇圧回路を省いたので、それほどノイズは出ていないと思う。
(昇圧モジュールが入っていたときは、けっこうFM放送受信に影響を与えていた感じがする。)
おわりに
これを作ろうという人はいないと思うが、もし参考になればということで、細かいところの動作を解説してみた。
只、回路定数については、アバウトな数値のものを使用しているのでそのあたりはご了承頂きたい。(それほど大きく逸脱はしていないハズ。)
回路的バグもあれば、ご指摘頂きたい。
引き続きテスト走行を実施していこうと思っている。
それから、各モジュールの設定方法を記載するつもりだったが、時間が無かったのでいつか追記したいと思う。
(助手席にとりあえず設置してテスト中のサブバッテリーシステム)
